
3Dプリンタ(RepRapPro Huxley)の組立-Y軸機構組立
RepRapのY軸の位置合わせはテーブルを移動させて行います。
テーブルはステッピングモータからベルトを使って駆動されます。
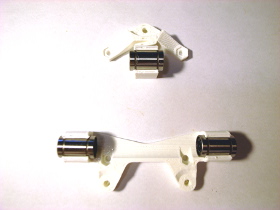
まず、スライド台座を組み立てます。
左右のリニアベアリングとその取り付け部材を組み立てます。結構ガタがあるので心配だったのですが、すべて組み上げると、ガタはなくなります。取り付け位置のばらつきと樹脂の弾力でうまくいくようです。
取り付け部材のネジ穴にバリがあったので、やすりで取り除きます。
台座ができました。
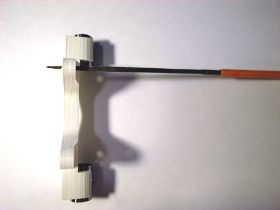
ロッドを通し、右側の2つのベアリングが台座に対し、直角になるように調整します。
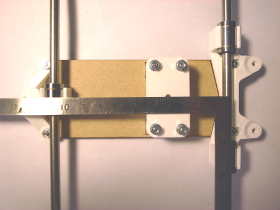
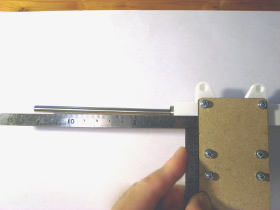
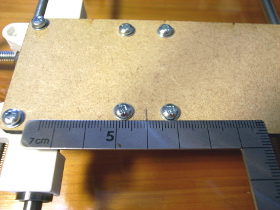
両ロットのベアリング間の距離を測ります。
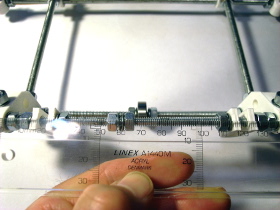
左右のロッドがフレームの中央に配置されるように、U字の樹脂を位置合わせします。
私の場合、ロッド間が108mm、フレームの左右の樹脂間が142mmだったので、フレームの左右の樹脂から17mmの位置にU字の樹脂を配置しました。
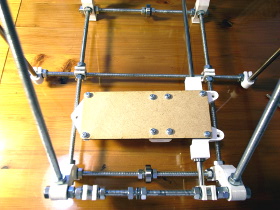
右側の2つのベアリングにロッドを通し、フレームに取り付けます。
ロッドの位置を確認しながらナットを締めます。
反対側も同様に行います。

台座の左側のベアリング取り付けネジを少し緩め、左側のロッドを、フレームのU字樹脂とベアリングに通します。
ロッド間の距離が、先ほど台座で測定した距離になるように調整します。
ロッド間の距離を確認しながらナットを締めます。
反対側も同様に行います。
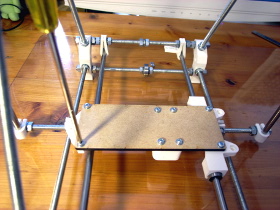
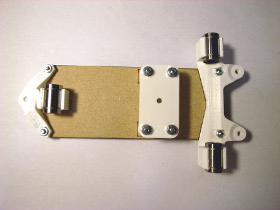
台座を前後に移動させ、スムーズに移動することを確認します。
確認したら、先ほど緩めていた左側のベアリング取り付けネジを締めます。

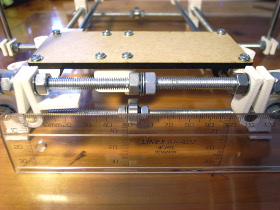
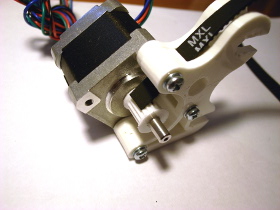
次にモーターを組み付けます。
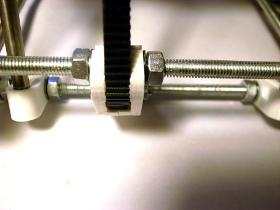
モーターのシャフトにプーリーを取り付けます。
シャフトには滑り止めの欠けがあるのですが、樹脂のプーリーの穴にも平らな角があるので、これに合わせます。

モーター取り付け部材をモータに取り付けます。
二つの樹脂部品がずれないように指で押さえながらネジを締めます。
プーリーがモータ本体に触れないように、スペーサーとして紙を用意します。
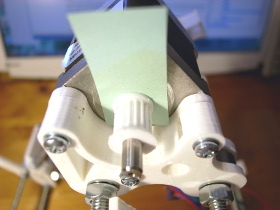
モーターとプーリーの間に紙をはさんで、プーリーを奥まで差し込みます。
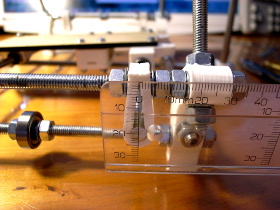
モーター取り付け位置の目安として、台座のベルト挟みの中心に印をつけます。
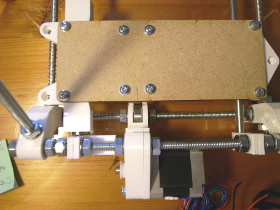
フレームの後ろ側にモーターを取り付けます。
先ほど付けた印がベアリングの中心になるようにします。
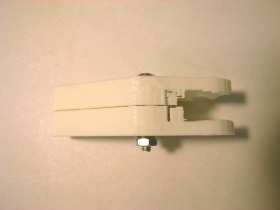
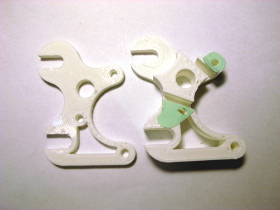
アイドラーを組み立てます。写真の板状のバリは取り除きます。

アイドラーのベアリングがを台座のベルト挟みの穴に合うように取り付けます。
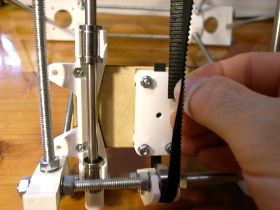
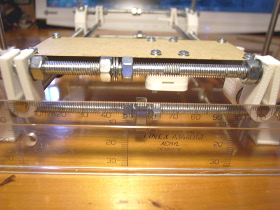
ベルトを取り付けます。
ベルトを組み立てマニュアルに従って、台座→モーターギア→ベアリング→ねじる→ベアリング→アイドラーベアリング→台座に通します。
両端が2cmほど重なる長さに切ります。少し長めの方が、作業しやすいです。

ベルトの緩みを少なくするために、予めベルトのテンションを下げておきます。モーター取り付けネジの2つを外し、モーターをベルトが緩む方向にずらします。

ベルト挟みのネジを緩め、一方の端を反対側に出るまで通し、指でこれを抑え、もう一方の端を凸凹が噛むようにベルト挟みの穴に差し込みます。
その状態で、ベルト挟みのネジを締めます。
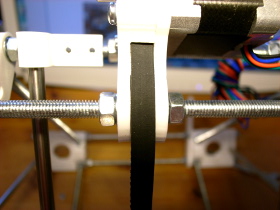
ずらしていたモーターを元に戻し、ベルトにテンションをかけます。
これで、一応、Y軸機構は完成です。
後はモーターのギアを指で回して、台座がスライドすることを確認するのですが、私の場合は台座がほとんど動きませんでした。
そこで、原因を調べてみました。
まず、モーター側の取り付け樹脂のベルト穴が狭く、摩擦が大きくなっていました。
ネジの締め付けを緩めると、改善されるのですが、これではモーターにガタが発生してしまいます。
そこで、取り付け樹脂の間に、紙で作ったスペーサーを挟みました。
次にモーター側のベアリングを樹脂の間隔が狭く、ベルトが挟まってしまい、動きが悪くなっていたので、締め付けを若干緩めました。
更にアイドラーの樹脂にバリがあり、これが、ベルトに当たっていました。

バリをやすりで削ります。もともと、ベルトをガイドするために出っ張りがあるので、これは削らず、とげのように出っ張った部分だけ削ります。
アイドラーのベアリングも、ベルトを挟み込まないように、若干緩く締めます。
これらの対策を行った結果、台座がスムーズに動くようになりました。
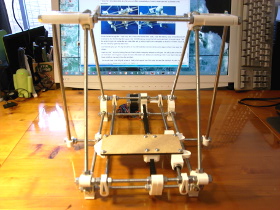
Y軸機構が完成しました。
スムーズに動かすために、精度を要求されるので、結構、苦労しました。