
X軸機構で作成した昇降台を上下に移動させます。 昇降台は左右のステッピングモータから長ネジを使って駆動されます。 この文書は個人的なものであり、公式組立マニュアルから私の理解した事柄を補足的に...
>> 本文を読む
X軸機構で作成した昇降台を上下に移動させます。 昇降台は左右のステッピングモータから長ネジを使って駆動されます。 この文書は個人的なものであり、公式組立マニュアルから私の理解した事柄を補足的に...
RepRapのX軸の位置合わせはZ軸機構で駆動される昇降台上でホットエンドを左右に移動させます。 ホットエンドの台座はステッピングモータからベルトを使って駆動されます。 この文書は個人的なものであり...
RepRapのY軸の位置合わせはテーブルを移動させて行います。 テーブルはステッピングモータからベルトを使って駆動されます。 この文書は個人的なものであり、公式組立マニュアルから私の理解した事柄を補足的に...

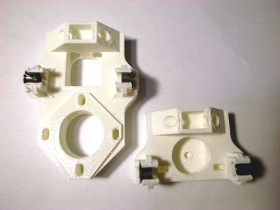
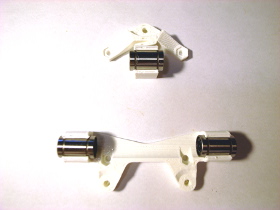
まずは、プリンタの基本構造であるフレームを作成します。 このプリンタのフレームは長いネジの金属棒で構成されています。これを樹脂パーツで固定、接合していきます。 ホームセンターに売っているような部材...

3Dプリンタが話題になり、新たな産業革命と騒がれています。 そのインパクトが社会に対し、どの様に影響するかは考えも及びませんが、製造技術を持たない者が、思い通りの造形物を作ることができるということは...