

我が家の年賀状は、3Dプリンタで作るのが、すっかり定例化しました。 今年も12月に入り、戌年をテーマに組み立て式の造形物を、あれこれ考えていました。 昨年の鳥のクリップでばねを作ることができることが...
>> 本文を読む
我が家の年賀状は、3Dプリンタで作るのが、すっかり定例化しました。 今年も12月に入り、戌年をテーマに組み立て式の造形物を、あれこれ考えていました。 昨年の鳥のクリップでばねを作ることができることが...
私の場合、一年は年賀状作りと共に終わりを迎えます。 年を追うごとに短くなる一年間は、その成果を実感し辛くなってきました。 今年も年賀状の話を耳にすると、ああもう一年が経ってしまったのかと...

私はブログに掲載する写真の撮影はコンデジ(RICOH/GR DIGITAL II)を使用しています。 ニュースで最新カメラの記事を目にする度、一眼レフでも買えば、もっといい写真が撮れるのでは思っては、やは...

前回は3DプリンタのCPU破損に伴い、MelziボードのCPU(ATMEGA1284P)を交換しました。 今回は、交換したCPUにソフトをインストールします。 この文書は個人的なものであり、読者による修理を推奨するものではなく...
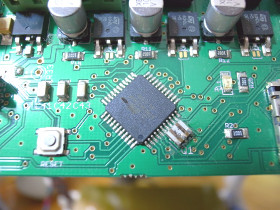
先日のヒーテッドベッドの修理でCPUを破損してしまったので、新たな修理が必要となってしまいました。 Huxleyの制御ボードはArduinoの派生基板でMelziと呼ばれるものです。バージョンは2です。 Melzi ver2の...